Como Montar o seu Robô WARLOCK

Views: 106
Torneio Warlock
O Torneio Warlock ocorre em Curitiba e região desde 2014 onde promove a competição entre competidores locais desafiando-os a desenvolverem robôs para as competições que podem ser divididas em duas modalidades básicas: Autônomo e Radio Controlado;
Cada modalidade segue regras específicas que limitam seu peso, tamanho e demais proibições, sempre leia as regras para cada modalidade, atente-se também que as regras mudam de torneio para torneio. O link para as regras está no final desse post.
Autônomo
Os robôs dessa modalidade não podem ser controlados remotamente, eles devem operar de forma independente apenas com o uso de sensores. Para a categoria Sumô, onde um robô deve empurrar o outro para fora do dojo (dojo é o ringe onde a competição ocorre, de acordo com as regras é todo preto com uma borda branca), o sensor mais importante é o sensor de linha, que detecta a linha branca da borda do dojo.

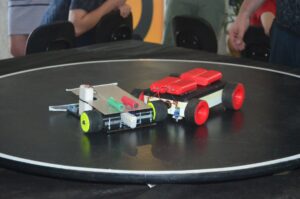
Figura 1 – Exemplo de Dojo
Para a montagem da estrutura mecânica do robô pode ser usado um chassi feito de MDF, acrílico, papelão ou outro material (atente para as dimensões e peso máximo informado nas regras de cada torneio)

Figura 2 – Sugestão de disposição das peças no chassi
Os componentes eletrônicos mínimo necessários são:
- Arduino ou outro microcontrolado (ou Lego NXT ou EV3)
![]()
Figura 3 – Arduino
- Ponte H para o controle dos motores
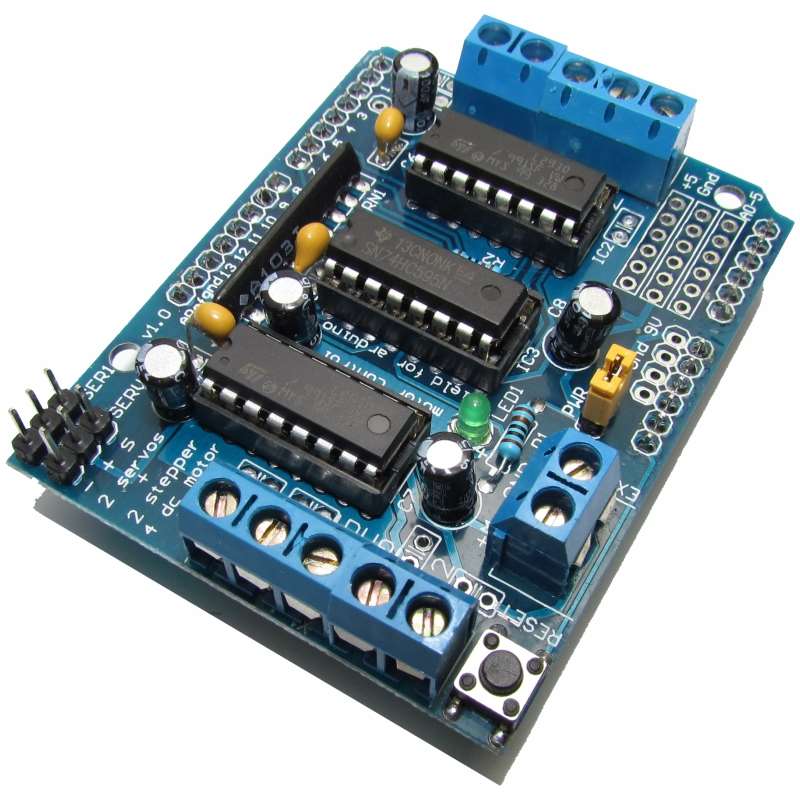
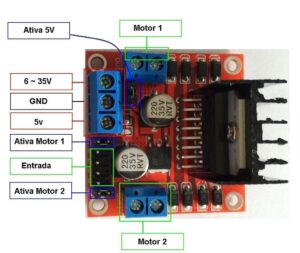
Figura 4 – Imagem da esquerda, motorshield para Arduino. Imagem da direita Ponte H com a mesma função, porém mais versátil.
- Par de motores com rodas, sugestão Motores DC TT ou outro tipo.
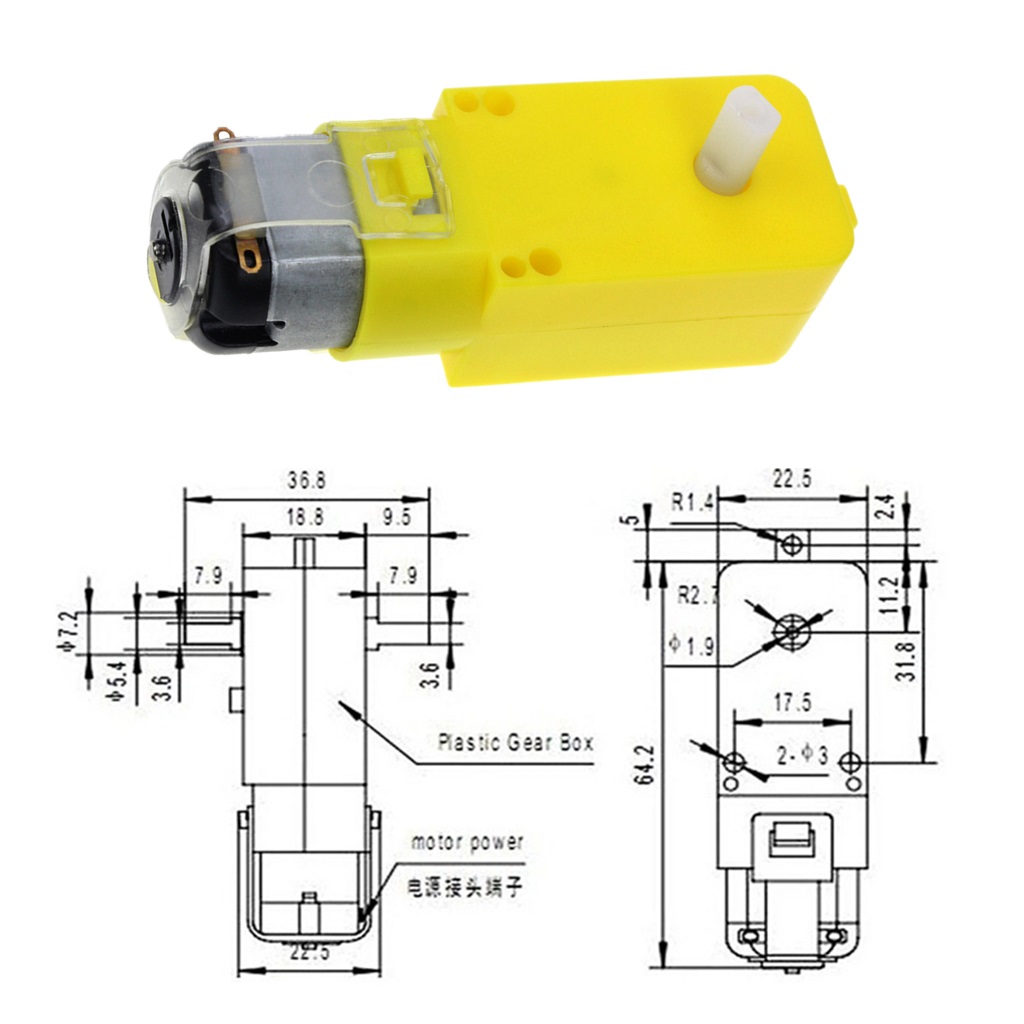
Figura 5 – Motor TT DC 3V~6V com Caixa de Redução
- Case para baterias e baterias – Recomenda-se o uso de um par de baterias íons de lítio (18650) ligadas em série totalizando 8,4 volts. Modelo para impressão 3D.


Figura 6 – Baterias
Os sensores recomendados são:
- Sensor Curto alcance – Sugere-se o uso de dois sensores do tipo infravermelho por reflexão de curto alcance, esse sensor é necessário para a detecção das bordas do campo.
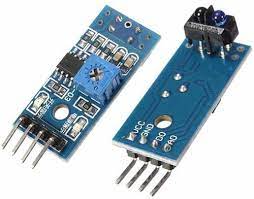
Figura 6 – Sensor infravermelho de curto alcance;
- Sensores Longo alcance – Esse sensor é opcional e serve para detectar o oponente, para isso sugere-se o uso dos seguintes tipos de sensores em ordem crescente de custo e complexidade:
- Sensor infravermelho de longo alcance – Pode detectar obstáculos a até 0,8 metros. É o mais utilizado atualmente.


Figura 7 – Sensor de infravermelho longo alcance. Da esquerda sensor GP2Y0A21 10-80cm e o da direita E18-d80nk ou similar.
- Sensor Ultrassom – Pode detectar obstáculos até 4 metros.

Figura 8 – Sensor de ultrassom
- Sensor laser – Com um custo mais elevado e com maior complexidade e precisão.

Figura 9 – Sensor laser – VL53L0X
- Outros sensores podem ser usados
Radio controlado
Na modalidade de rádio controlados, os robôs são controlados por um piloto, fazendo o uso de controles, estes robôs utilizam-se das mesmas peças explicadas na sessão anterior, porém não necessitam de sensores e seu controle é feito por um player.
Os tipos de controles sugeridos são:
- Controle via bluetooth – Necessita de um módulo bluetooth e pode utilizar o celular como controle. Barato e fácil de implementar, mas não tem um bom controle tátil devido ao uso do celular. Atente para o uso de dos resistores para o divisor resistivo, um de 1K Ohms e outro de 2,2K Ohms, não usar esses resistores pode ocasionar a queima do módulo. Pesquise sobre.

Figura 10 – Bluetooth – HC06
- Controle Playstation 2 (PS2) – Um custo um pouco mais elevado, mas tem uma ótima jogabilidade;
- Controle usado em drones, aviões e carros RC (Radio Controlados) – possuem um custo mais elevados, mas permite a ligação dos motores sem o uso do microcontrolado (like Arduino)
- Outros tipos de controles – Ainda é possível usar outros tipos de controle, como por exemplo os usados em carrinhos de brinquedos que podem ser desmontados e usado junto ou não do Arduino.
NOTAS
Caso necessite, o Espaço CMaker também loca peças. AQUI.
DÚVIDAS? Acesse nosso servidor no Discord no canal WARLOCK (necessário se apresentar para ter acesso)
Exemplos de Robôs
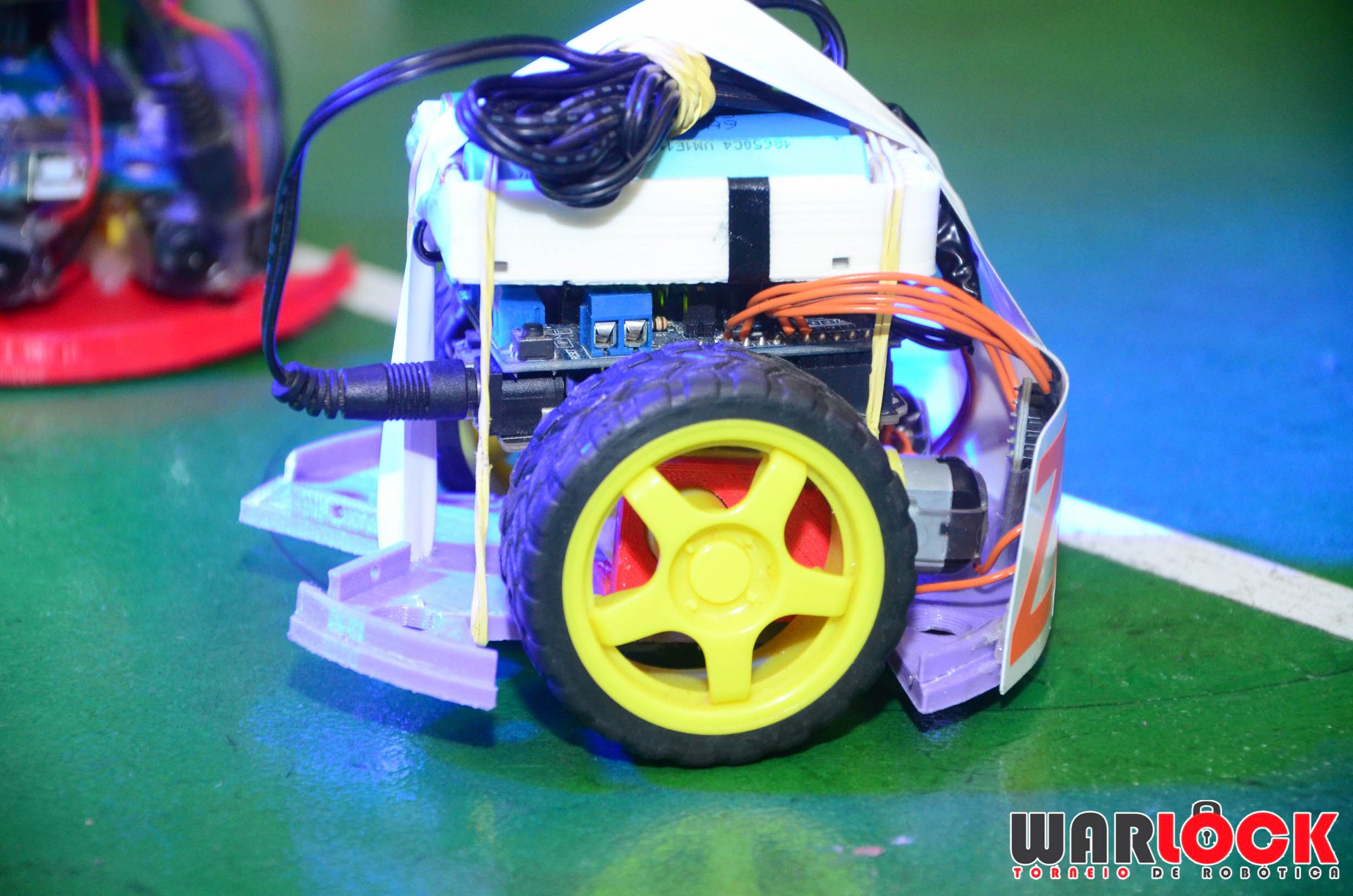

Figura 11 – Robôs autônomos e radio controlados, modalidades sumô e futebol de robôs.
Exemplos de Código
RADIO CONTROLADO
Código do Futebol de Robôs controle PS2 Analógico Versão 0.8 – Download Github.
Nota: Aja como um maker, caso modifique o código disponibilize para a comunidade, pode ser um link aqui como comentário ou em algum dos nossos canais .(Aqui)
AUTÔNOMO
#define M1A 5
#define M1B 6
#define M2A 10
#define M2B 11
//Pinagem infravermelho
int pin_iv_d = A5; //14
int pin_iv_e = A4; //15
void setup()
{
Serial.begin(9600);
pinMode(M1A, OUTPUT);
pinMode(M1B, OUTPUT);
pinMode(M2A, OUTPUT);
pinMode(M2B, OUTPUT);
}
void loop()
{
int sensorValueDir, sensorValueEsq;
sensorValueDir = infra_vermelho(pin_iv_d);//30-800 (branco-preto)
sensorValueEsq = infra_vermelho(pin_iv_e);//20-500 (branco-preto)
frente();
if(sensorValueDir < 400)
esquerda();
if(sensorValueEsq < 400)
direita();
}
void frente()
{
digitalWrite(M1A,HIGH);
digitalWrite(M1b,LOW);
digitalWrite(M2A,HIGH);
digitalWrite(M2B,LOW);
}
void esquerda()
{
//Em construção…
}
void direita()
{
//Em construção…
}
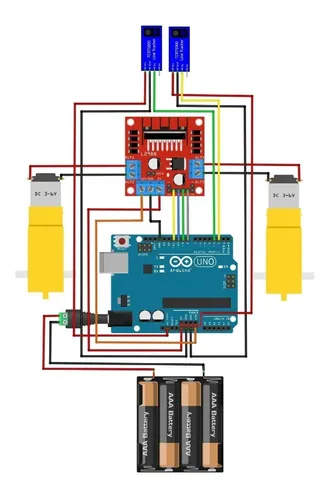
Circuito
REFERÊNCIAS
Seguidor de linha com ponte H – https://aluno.escoladigital.pr.gov.br/sites/alunos/arquivos_restritos/files/documento/2023-05/aula33_seguidor_linha_robotica_educacional_kit2023_em_m1.pdf
Esse excelente material produzido pelo Governo do Estado do Paraná pode ser usado como apoio para a montagem do robôs de sumô.
Apostila com projeto do robô de sumô, com MotoShield – https://aluno.escoladigital.pr.gov.br/sites/alunos/arquivos_restritos/files/documento/2021-05/aula38_robo_sumo_estrutura.pdf
COMO PARTICIPAR
COMPETIDORES


Links para contato:
ESCOLAS, FACULDADES E CURSOS TÉCNICOS


Caso queira promover um Torneio Warlock em sua instituição entre em contato conosco por um dos canais abaixo.